UT: Robots used to Analyze Aquatic Environments - Case Study
Overview
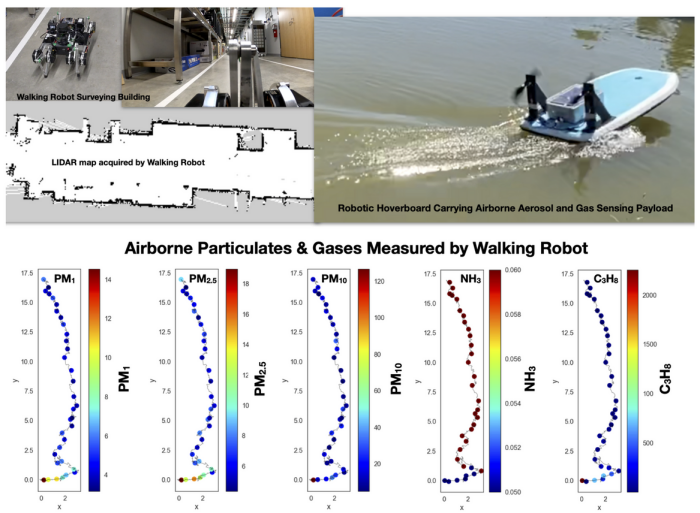
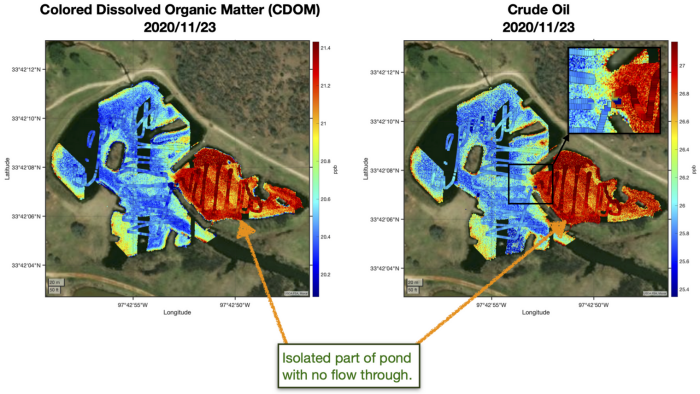
The University of Texas/Dallas is developing a method to assess environmental sites that might be dangerous or challenging for humans to enter, such as after a hurricane, oil spill, chemical leak, or other disasters. They have designed an autonomous, integrated robotic system using an unmanned boat, unmanned aircraft, and ground robots. These devices can access and navigate areas that are difficult to reach and dangerous for humans, such as aquatic environments.
Challenge:
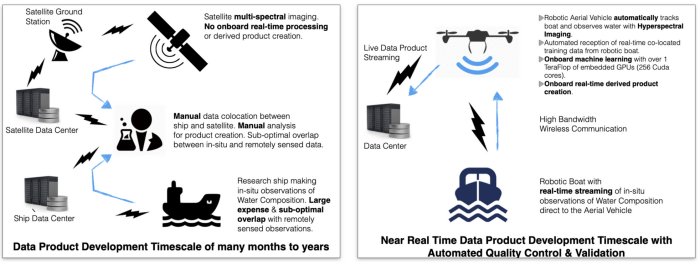
The challenge is to develop a more effective method to gain information about an environment that might be inaccessible to humans (in the case of a natural disaster, for example) and keep humans safe in potentially dangerous areas as they attempt to gather data to determine the conditions of air and water. Further, the sensors used in the past to collect data to study air and water quality have been expensive, cumbersome, and not able to provide critical information in an efficient, timely manner.
Solution
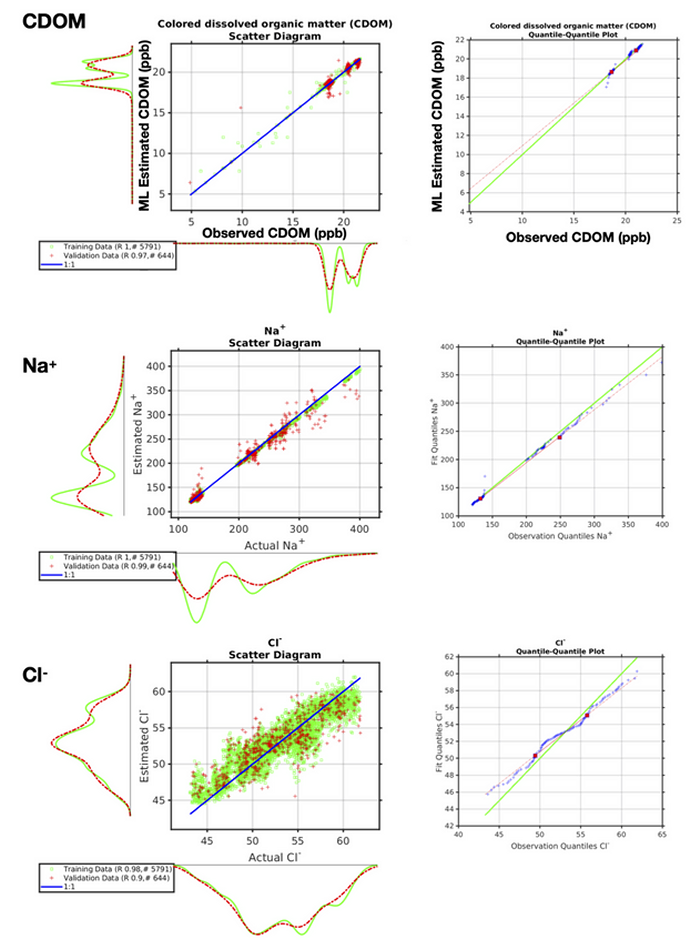
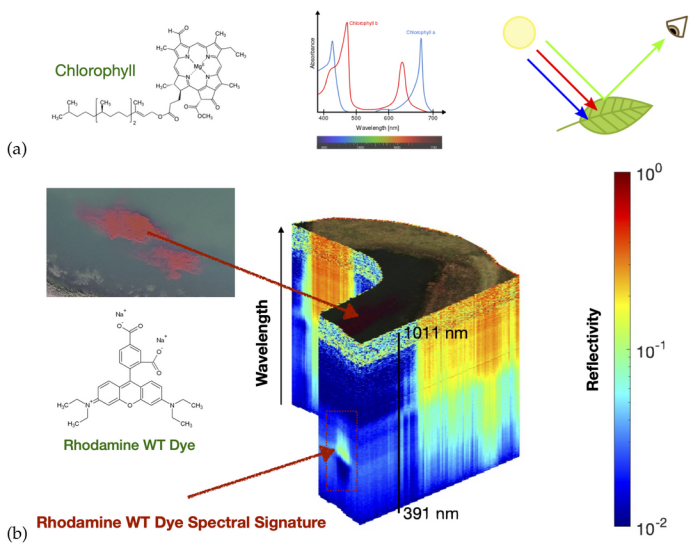
In addition to robotic equipment used from air and land, the UT team is using autonomous boats to determine water quality. Three Eureka Manta probes were placed under the boat that gathers important information such as temperature, turbidity, conductivity, and aquatic vegetation. The probes provide valuable, real-time information which would prove vital in rapidly addressing water conditions.
Result
The UT/Dallas team has successfully developed a fleet of autonomous robots that work together and can rapidly learn the characteristics of environments they had not seen before. The data they collect is comprehensive and streamed immediately, in real time, making it safer and more accurate for disaster teams to quickly determine what solutions are needed to address the problems they face.
From The Dallas Morning News:
https://www.dallasnews.com/news/2022/07/06/environmental-cleanup-robots-being-trained-at-ut-dallas-to-tackle-hurricanes-oil-spills/
Journal article:
https://www.mdpi.com/1424-8220/21/6/2240
Watch Phase 1 of the UT/Dallas demonstration:
AIM - UT Dallas Phase 1 Demonstration
Watch Phase 2 of the UT/Dallas demonstration: