

- Home
- Companies
- IQUA Robotics
- Software
IQUA Robotics software
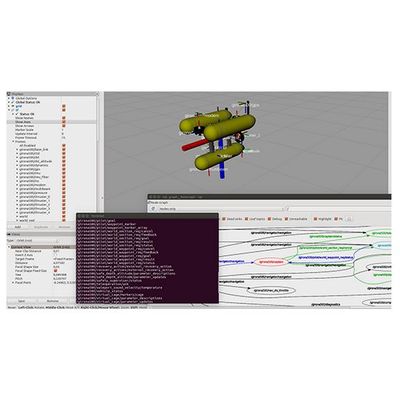
IQUA - Model COLA2 - Component Oriented Layer-based Architecture Software
COLA2 (Component Oriented Layer-based Architecture for Autonomy) is the ROS-based software architecture running in the underwater vehicles from Iqua Robotics. It includes a full control stack, a localization module with a navigation filter, a set of safety-related nodes and all the necessary drivers to communicate with the available hardware. Thus, COLA2 endows Iqua vehicles with a complete software suite that turns them in fully operational AUVs. Besides, it also sets the basis for further development of more advanced functions.
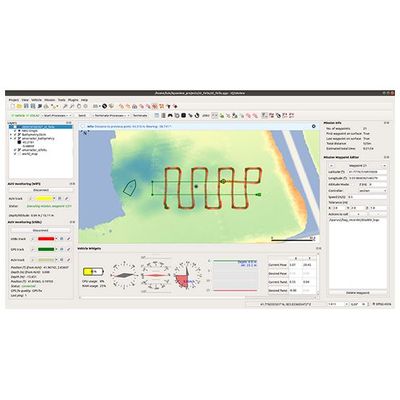
Model IQUAview - Graphical User Interface Software (GUI)
IQUAview is the graphical user interface (GUI) that allows to operate the family of vehicles from Iqua Robotics in a simple and user-friendly manner. IQUAview provides a front-end to the COLA2 architecture in order to be able to communicate with the robot, configure a basic set of parameters, plan missions and monitor them using an intuitive graphical interface based in a QGIS backend.
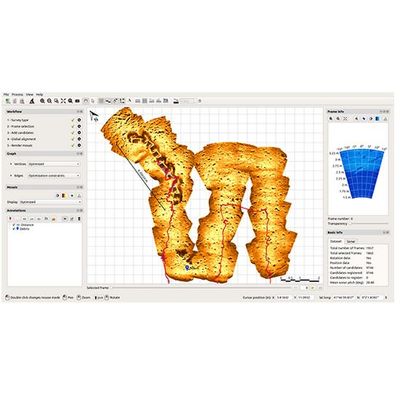
Model SoundTiles - Software for Automatic Generation of Underwater Acoustic Mosaics
SoundTiles is a stand-alone software to create acoustic maps using forward-looking sonar data.