

- Home
- Companies
- iSeaMC GmbH
- Products
iSeaMC GmbH products
Crawler Systems

iSeaMC - Model Rossia Series - PEHD-500 - Seafloor Robots
Our robots are regularly operating at 900 m water depth for 12 – 18 months since 2010. These highly reliable tele-operated systems have been regularly improved and after 10 years of development we can now offer our latest version. This small robot offers a higher payload with enhanced control electronics and can be deployed down to 6000 m water depth. Modern marine survey technologies utilze a toolbox of robotic infrastructure including ROVs , AUVs, Glider and sea floor crawlers which grant maximum success when specifically applied.
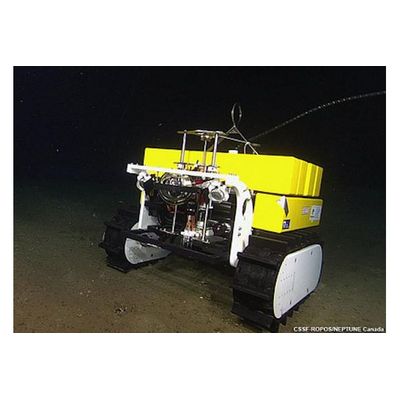
iSeaMC - Model Wally Crawler Series - Teleoperated Crawler System
This teleoperated Crawler is connected to any cabled observatory to carry out operations with real-time data supply. The crawler can monitor and study an area of sediment surface proportional to the length of its umbilical cable. Typically a buoyant flexible 20 mm diameter Polyurethane (PUR) sea cable, containing two wires for power supply and 4 twisted-pair wires for Etherbit communication is used. It is 70 m long, connected to a junction box, giving a coverage of 15,000 m2.
Others

Rossia - Model 300 - Shelf Survey System
The Rossia 200 (200m rated) is a tele-operated cost efficient handy survey tool for industrial and scientific applicactions on the shelf. Powered by 2 – 6 kWh batteries, the Rossia 200 tows a small surface buoy carrying a W-Lan Transmitter. You can control this robot from a ship nearby or from an operational centre several miles away.
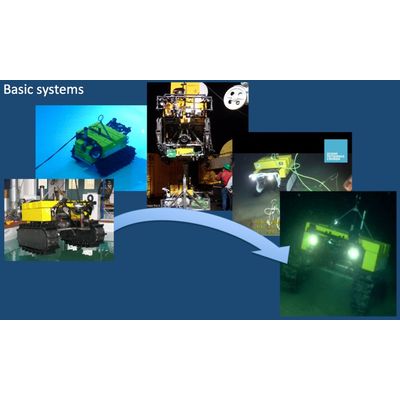
iSeaMC - Model Wally Crawler Series - Basic System
This teleoperated Crawler is connected to any cabled observatory to carry out operations with real-time data supply. The crawler can monitor and study an area of sediment surface proportional to the length of its umbilical cable. Typically a buoyant flexible 20 mm diameter Polyurethane (PUR) sea cable, containing two wires for power supply and 4 twisted-pair wires for Etherbit communication is used. It is 70 m long, connected to a junction box, giving a coverage of 15,000 m2. The caterpillar tracks create a footprint on the seafloor of 0.35m2 with a weight of ≈10 g/cm2. A port manager, housed within a titanium pressure housing connects the Crawler to the junction box. It can be accessed via a standard Internet connection. A microcomputer which runs the two software applications required for motor control and running the Crawler web server uses a real-time operating system (RTOS) and can be contacted remotely via Telnet or an ftp connection.