Inertial Labs - Model INS-P-OEM -GPS-Aided Inertial Navigation System
The Professional Inertial Labs GPS-Aided Inertial Navigation System (INS-P-OEM) is the OEM version of Inertial Labs` new generation, fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, NAVIC and BEIDOU GNSS and high-performance strapdown system, that determines position, velocity and absolute orientation (Heading, Pitch and Roll) for any device on which it is mounted. Horizontal and Vertical Position, Velocity and Orientation are determined with a high level of accuracy for both motionless and dynamic applications.
The Inertial Labs INS-P-OEM utilizes an advanced single antenna GNSS receiver, barometer, 3-axes each of calibrated in full operational temperature range precision Fluxgate magnetometers, Advanced MEMS Accelerometers and Gyroscopes to provide accurate Position, Velocity, Heading, Pitch and Roll of the device under measure. The INS-P-OEM contains Inertial Labs new onboard sensors fusion filter, state of the art navigation and guidance algorithms, and calibration software.
- Tactical Grade IMU
- Competitively priced
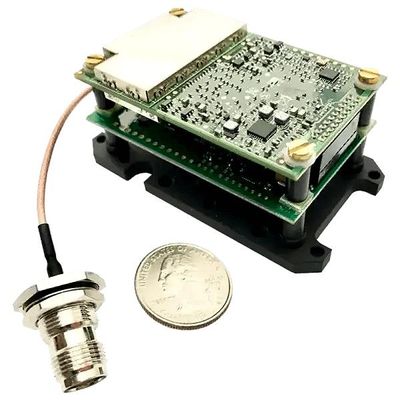
- Small Size, light weight
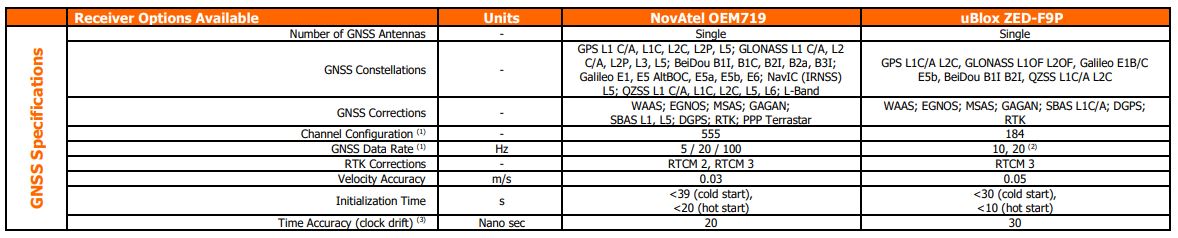
- NovAtel/uBlox GNSS Receiver
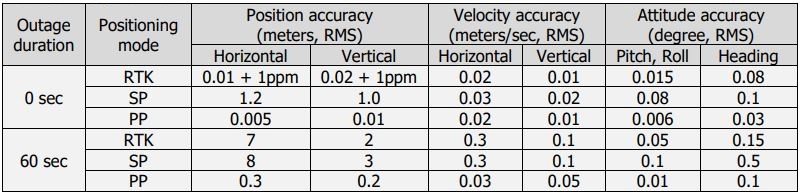
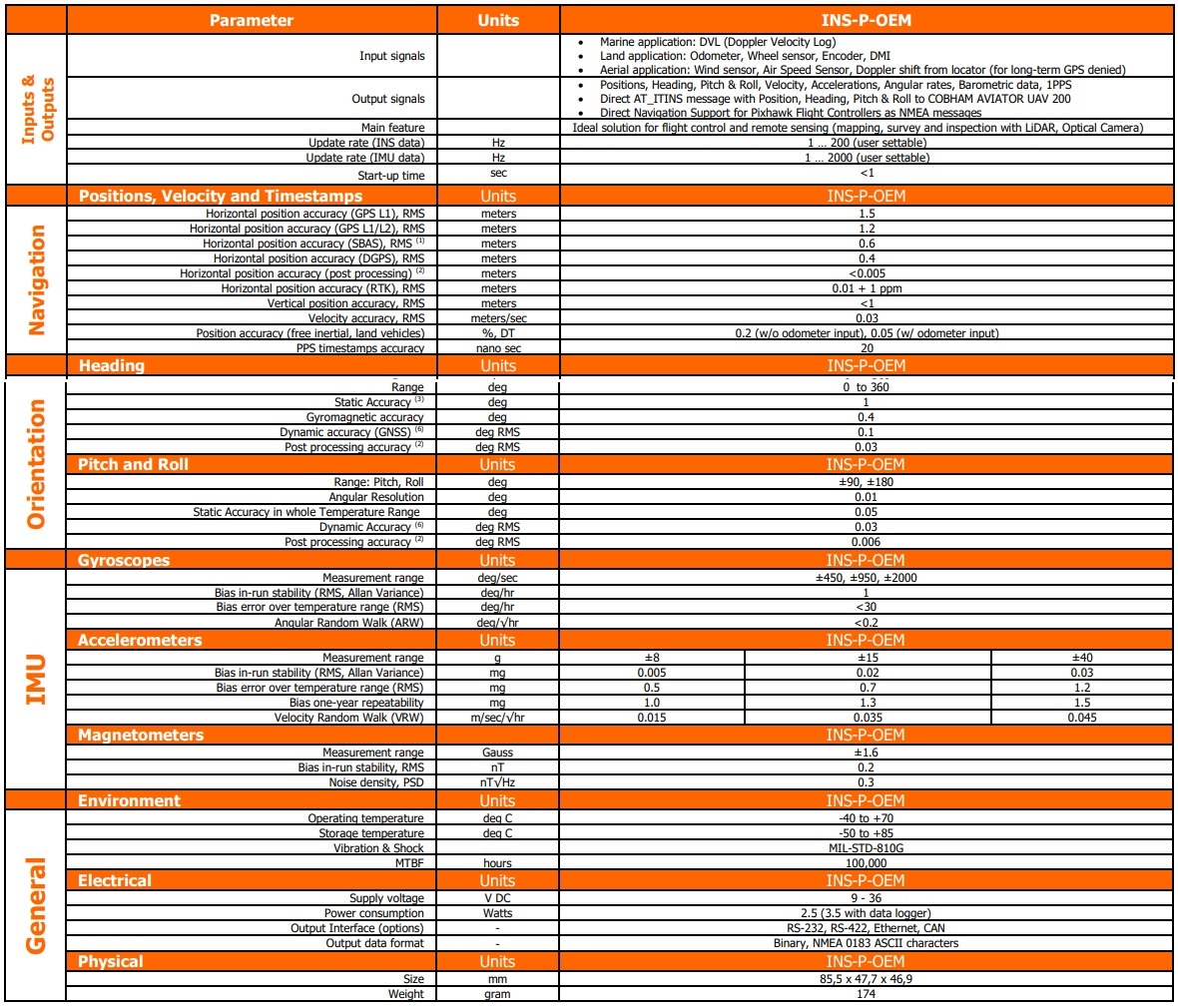
- 0.5 cm Position accuracy (PPK)
- 0.03 deg Heading accuracy (PPK)
- 0.006 deg Pitch & Roll accuracy (PPK)
- Ideal solution for accurate point clouds
- Compatible with LIDAR, Optical camera
- Applications: flight control, remote sensing
- Embedded gyro compensated Fluxgate compass
- Real time (RTK) & Post Processing (PPK) Kinematics
- Commercially exportable GPS-Aided Inertial Navigation System
- Small size & light weight: 85,5 x 47,7 x 46,9 mm size and 174-gram weight
- High precision IMU (1 deg/hr gyroscopes and 5 micro g accelerometers Bias in-run stability)
- GPS, GLONASS, GALILEO, BEIDOU, QZSS, NAVIC, SBAS, DGPS, RTK supported signals
- Compatibility with LiDARs (Velodyne, RIEGL, FARO)
- Trigger for optical camera
- Up to 2000 Hz IMU; 200 Hz INS and 100 Hz GNSS data rate
- GNSS measurements and IMU raw data for post processing
- Advanced, extendable, embedded Kalrman Filter based sensor fusion algorithms
- State-of-the-art algorithms for different dynamic motions of Vessels, Ships, Helicopters, UAV, UUV, UGV, AGV, ROV, Gimbals and Land Vehicles
- Implemented ZUPT, Tunnel Guide, and GNSS tracking angle features
- Full temperature calibration of all sensing elements
(1) GPS only
(2) RMS, incremental error growth from steady state accuracy. Post-processing results using third party software
(3) calibrated in whole operational temperature range, in homogeneous
magnetic environment, for latitude up to ±65 deg
(4) tracks up to 60 L1/L2 satellites
(5) 50 Hz while tracking up to 20 satellites. 20 Hz position update rate for Basic model of INS
(6) dynamic accuracy may depend on type of motion
(7) time accuracy does not include biases due to RF or antenna delay