

- Home
- Companies
- Inertial Labs, a VIAVI Solutions ...
- Products
- Inertial Labs - Model INS-DM - ...

Inertial Labs - Model INS-DM -GPS-Aided Inertial Navigation System
The Inertial Labs GPS-Aided Inertial Navigation System (INS-DM) is the latest version of Inertial Navigation System, developed by Inertial Labs. The INS-DM is the result of over 20 years of our experience in developing and supplying INS solutions to land, marine and aerial platforms around the world. This system, the INS-DM, is an IP68 rated version of an all-new generation of super ruggedized, shielded from the EMC/EMI, fully-integrated, combined Inertial Navigation System (INS) + Attitude & Heading Reference System (AHRS) + Air Data Computer (ADC) high-performance strapdown system, that determines position, velocity and absolute orientation (Heading, Pitch and Roll) for any device on which it is mounted. Horizontal and Vertical Position, Velocity and Orientation are determined with high accuracy for both motionless and dynamic applications.
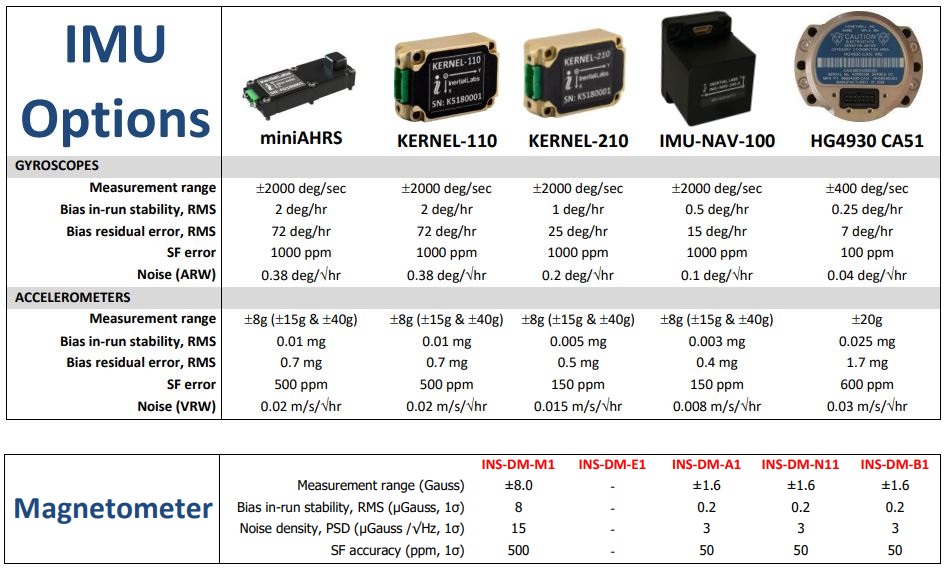
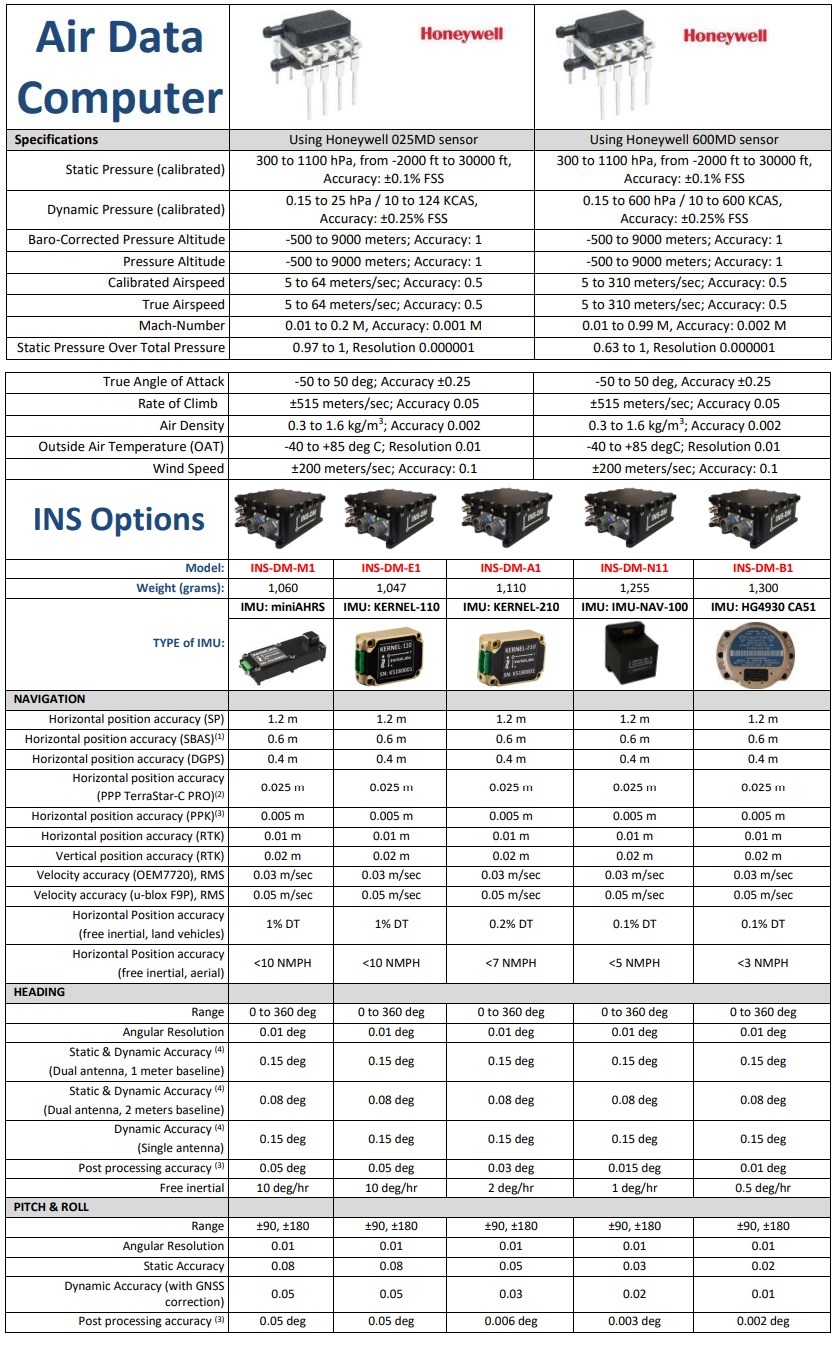
The Inertia! Labs INS-DM can support multiple types of MEMS Inertial Measurement Units (IMU) developed by Inertial Labs. Additionally, the INS-DM supports other IMU`s, like the Honeywell HG4930. The INS-DM also utilizes different multi constellation (GPS, GLONASS, GALILEO, QZSS and BEIDOU) GNSS receivers like NovAtel OEM7 series or the u-blox F9 series. The design of the INS-DM also includes an optional Air Data Computer (ADC), supported by two barometers, and the ability to support an external Stand-Alone Magnetic Compass (SAMC). The INS-DM contains Inertial Labs new on-board sensor fusion filter, state of the art navigation and guidance algorithms, and calibration software.
- Commercially exportable GPS-Aided Inertial Navigation System
- 3-in-1 strapdown system: INS + AHRS + ADC (Air Data Computer)
- Embedded Honeywell or Inertial Labs MEMS Inertial Measurement Unit (IMU)
- NovAtel OEM7, u-blox ZED-F9P, or Septentrio mosaic-H High Precision GNSS receiver
- GPS, GLONASS, GALILEO, BEIDOU, QZSS, RTK supported signals
- Total and Static Pressure Sensors for calculating Indicated Airspeed
- SP, SBAS, DGPS, RTK and PPP for real time operation
- GNSS measurements and IMU raw data for post processing
- Advanced, extendable, embedded Kalman Filter based sensor fusion algorithms
- State-of-the-art algorithms for different dynamic motions of Helicopters, and UAV
- Full temperature calibration of all sensing elements
- EMC, EMI, and ERD protection
- Environmentally sealed (IP68)
- Aiding data: Wind sensor, Air Speed Sensor, Doppler shift from locator (for long-term GPS denied), External position and External Heading.
General
Optional Input Signals
- External Magnetometer, Wind sensor, Air Speed Sensor, Doppler shift from locator (for long-term GPS denied), External position and External Heading aiding data
Output Signals
- IMU data: Accelerations, Angular rates, Magnetic field;
- AHRS data: Heading, Pitch & Roll
- INS data: Positions, Velocity, Delta Theta and Delta Velocity, GNSS data, Time
- Air Data Computer data: Static Pressure (calibrated), Dynamic Pressure (calibrated), Baro-Corrected Pressure Altitude, Pressure Altitude, Calibrated Airspeed, True Airspeed, Mach-Number, Static Pressure Over Total Pressure, True Angle of Attack, Rate of Climb
Electrical & Mechanical
- Update rate: 1 … 200 Hz (INS & AHRS data); up to 2000 Hz (IMU data)
- Start-up time: <1 sec
- Interface: RS-232 / RS-422 / CAN / Ethernet
- Input power protection: MIL-STD-1275 (optional)
- Input power: 9 to 36 V DC (27 ± 10 for MIL-STD-1275 protection)
- Output data: Binary, NMEA 0183 ASCII characters
- 1 PPS level: 3.3 V DC TTL / 5 V DC TTL / differential
- EMC/EMI: MIL-STD-461F
- Type of Sealing: IP68
- MTBF: 100000 hours
- Dimensions: 160.4 x 141.2 x 61.1 mm
- Weight: 1345 grams (depends on configuration)
Environment
- Operational Temperature: -40 to +80C
- Storage Temperature: -50 to +85C
- Humidity: Up to 95%
- Sand, Dust, Water, Shock, Vibration: MIL-STD-810G
- Altitude: up to 15,000 m (50,000 ft)
- Acoustic noise: 185 dB max

(1) GPS only;
(2) For NovAtel OEM7720 GNSS receiver only. Requires a subscription to a TerraStar data service;
(3) RMS, incremental error growth from steady state accuracy. Post-processing results using third party software;
(4) dynamic accuracy may depend on type of motion;

- INS-DM: Dual Antenna GPS-Aided Inertial Navigation System
- M1: Inertial Labs miniAHRS Attitude & Heading Reference System
- E1: Inertial Labs KERNEL-110 IMU
- A1: Inertial Labs KERNEL-210IMU
- N11: Inertial Labs IMU-NAV-100
- B1: Honeywell HG4930 CA51 IMU
- G2000: Gyroscopes measurement range = ±2000 deg/sec
- G950: Gyroscopes measurement range = ±950 deg/sec
- G450: Gyroscopes measurement range = ±450 deg/sec
- G400: Gyroscopes measurement range = ±400 deg/sec (using Honeywell HG4930 CA51 IMU)
- A8: Accelerometers measurement range ±8 g
- A15: Accelerometers measurement range ±15g
- A20: Accelerometers measurement range ±20 g (using Honeywell HG4930 CA51 IMU)
- A40: Accelerometers measurement range ±40 g
- TGA: Calibration of IMU (Gyroscopes and Accelerometers) in operational temperature range
- TMGA: Calibration of IMU (Magnetometers, Gyroscopes and Accelerometers) in operational temperature range
- C71: two connectors (22 – main; 13 – auxiliary)
- C72: C71 with MIL-STD-1275 protection
- C73: MIL-STD-1275 protection, enclosure with asymmetrical alignment mounting holes
- E: Encoder support
- 0P: Zero Airspeed Pressure Ports (Total/Static)
- 2P: Two Airspeed Pressure Ports with Standard Range (Total/Static, Honeywell 025MD)
- 2PEXT: Two Airspeed Pressure Ports with Extended Range (Total/Static, Honeywell 600MD)
- B: Black Color of enclosure (default)
- G: Green Color of enclosure (optional)
- D: Desert Tan Color of enclosure (optional)
- SAMC: External Stand-Alone Magnetic Compass (optional)
- S64: 64GB embedded Data Logger (optional)
- ZD9P: u-blox ZED-F9P dual antenna GNSS receiver
- O7720: NovAtel OEM7720 dual antenna GNSS receiver
- DMH: Septentrio mosaic-H dual antenna GNSS receiver
- VD9: GPS L1/L2, GLONASS L1/L2, BEIDOU B1/B2, GALILEO E1/E5, QZSS L1/L5, DGPS, RTK, Dual antenna Heading, GNSS measurements, GNSS positions (Dual Antenna GNSS Receiver only)
- 12345: RS-232, RS-422, RS-485 (for stand-alone magnetic compass only), CAN, Ethernet
- 1245: RS-232, RS-422, CAN, Ethernet (in case of using internal datalogger)
- 145: RS-232, CAN, Ethernet (in case of using internal datalogger + encoder)