

- Home
- Companies
- Inertial Labs, a VIAVI Solutions ...
- Products
- Inertial Labs - Model INS-U-OEM - ...

Inertial Labs - Model INS-U-OEM -GPS-Aided Inertial Navigation System
The Inertial Labs GPS-Aided Inertial Navigation System (INS-U-OEM) is OEM version of new generation, fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU GNSS and high-performance strapdown system, that determines position, velocity and absolute orientation (Heading, Pitch and Roll) for any device on which it is mounted. Horizontal and Vertical Position, Velocity and Orientation are determined with high accuracy for both motionless and dynamic applications.
The Inertial Labs INS-U-OEM utilizes advanced single antenna GNSS receiver, two barometers, magnetometers, 3-axes each of calibrated in full operational temperature range Advanced MEMS Accelerometers and Gyroscopes to provide accurate Position, Velocity, Heading, Pitch and Roll of the device under measure.
INS-U-OEM contains Inertial Labs new on-board sensors fusion filter, state of the art navigation and guidance algorithms and calibration software.
- INS, AHRS and ADC (Air Data Computer) output data
- Multi frequency and Multi constellations GNSS Receiver
- GPS, GLONASS, GALILEO, QZSS and BEIDOU GNSS
- Designed for fixed-wing and multi-rotor Aerial Platforms
- Two Barometers for Indicated Airspeed
- Position accuracy = 1 cm (RTK)
- Heading accuracy = 0.3 deg (RTK, Dynamic)
- Pitch & Roll accuracy = 0.1 deg (RTK, Dynamic)
- Gyro-compensated, embedded Fluxgate magnetic compass
- Optional external Stand-Alone Magnetic Compass
- Small Size, light weight, low power
- Affordable price
- Commercially exportable GPS-Aided Inertial Navigation System
- 3-in-l strapdown system: INS + AHRS + ADC (Air Data Computer)
- Embedded in-flight calibration
- UBIox ZED-F9P F9 High Precision GNSS Module
- Small size & light weight & low power
- GPS, GLONASS, GALILEO, BEIDOU, QZSS, RTK supported signals
- Total and static pressure sensors for calculating Indicated Airspeed
- Embedded or External Inertial Labs Magneto-Inductive and Mini-Fluxgate magnetometers (compass)
- GNSS measurements and IMU raw data for post processing Advanced, extendable, embedded Kalman Filter based sensor fusion algorithms
- State-of-the-art algorithms for different dynamic motions of Helicopters, and UAV
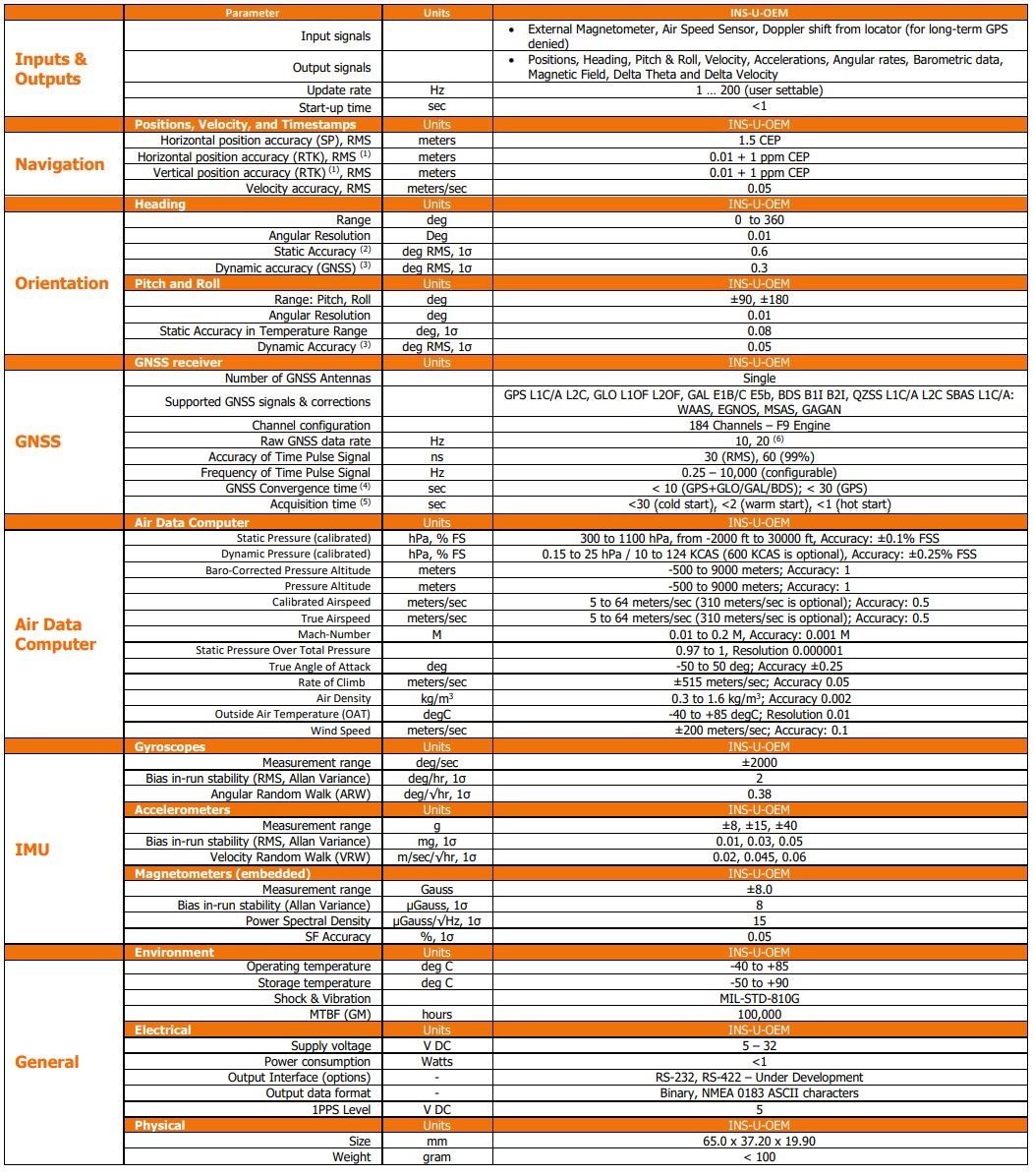
(1) Measured using 1 km baseline and patch antennas with good ground planes. Does not account for possible antenna phase center offset errors. ppm limited to baselines up to 20 km
(2) in homogeneous magnetic environment, for latitude up to ±65 deg; calibrated in whole operational temperature range
(3) 50% @ 30 m/s dynamic operation, accuracy may depend on type of motion
(4) depends on atmospheric conditions, baseline length, GNSS antenna, multipath conditions, satellite visibility and geometry.
(5) Commanded start. All satellites at – 130 dBm
(6) If tracking GPS only