

- Home
- Companies
- Inertial Labs, a VIAVI Solutions ...
- Products
- Inertial Labs - Model OptoAHRS-II - ...



Inertial Labs - Model OptoAHRS-II -Attitude and Heading Reference System
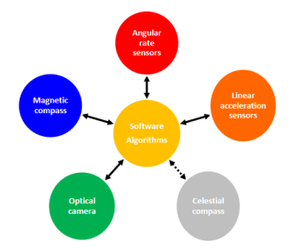
Developed by Inertial Labs, the Optically-enhanced Attitude and Heading Reference System – OptoAHRSTM-II is a small size, lower power consumption, precise North-finding and North-keeping system. It combines technologies of inertial sensors with optical image tracking resulting in a robust and reliable 3DOF orientation module capable of operation in virtually any environment.
After a successful magnetic calibration, high precision magnetometer headings can be obtained in environments with an undisturbed Earth magnetic field. With the addition of optical image tracking, the Inertial LabsTM OptoAHRS-II is also able to mount directly to the device under measure, and with one known reference direction, can be turned on and operated immediately without any magnetic calibration or reliance on magnetic field whatsoever.
OptoAHRSTH-II works through the use of reference images. A reference image can be any picture of the horizon or nearby environment in a single direction. Within the reference image, the system identifies a constellation of visual features. From any subsequent image collected by the camera, heading is determined by comparing the new constellation of features back to that of the appropriate reference.
By incorporating optical orientation data into the sensor fusion solution, the device can be resilient against changes in magnetic interferences present in the environment during operation.
Each of the technologies compensate for each other`s deficiencies and errors, acting as a self checking and calibrating system. For example, if a magnetic change is sensed, but the camera and accelerometers see no change - the magnetic change is ignored.
- Land Survey;
- Geodesy and Cartography;
- Crane Safety and Control Systems;
- Geospatial Systems;
- Oil & Gas Drilling;
- Antenna Pointing Systems;
- Platforms for North-Finding and North-Keeping

- OptoAHRSTM-II eliminates large errors inherent with Digital Magnetic Compass technology
- Hybrid North Finding and North Keeping System
- Real-time optical and inertial sensors orientation tracking
- Highly accurate, sensitive, and temperature stable Fluxgate magnetometers (in-house technology)
- Advanced, extendable, embedded Kalman Filter based sensor fusion algorithms
- Embedded 2D and 3D magnetic calibration on hard and soft iron
- Environmentally sealed (IP67)
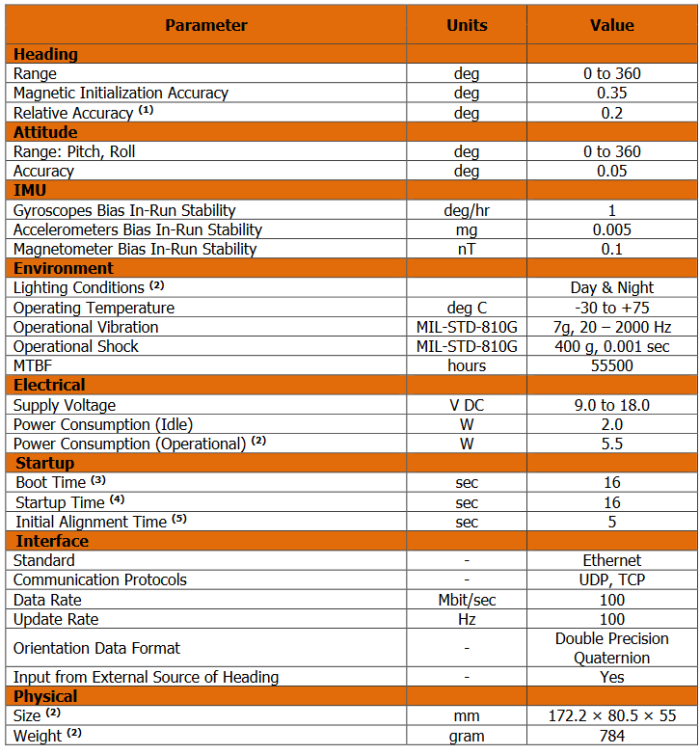
- Relative Accuracy is the in-operation error from a known initial reference
- This specification is based on Day/Night Camera version OptoAHRS. The Day Camera version OptoAHRS will have a slightly different specification.
- Boot Time defines the time between the moment of power supply and the moment of device readiness. Does not include the Startup Time.
- Startup Time defines the time between the Start Filter command and the first orientation data being produced. Includes the Initial Alignment Time. Does not include the Boot Time.
- Initial Alignment is the period during which sensor biases are observed and adjusted prior to outputting accurate orientation data. During this period, the device must be kept still (and away from magnetic influences when using magnetic initialization)