

- Home
- Companies
- Maritime Robotics AS
- Products
- Model Mariner - Unmanned Surface ...

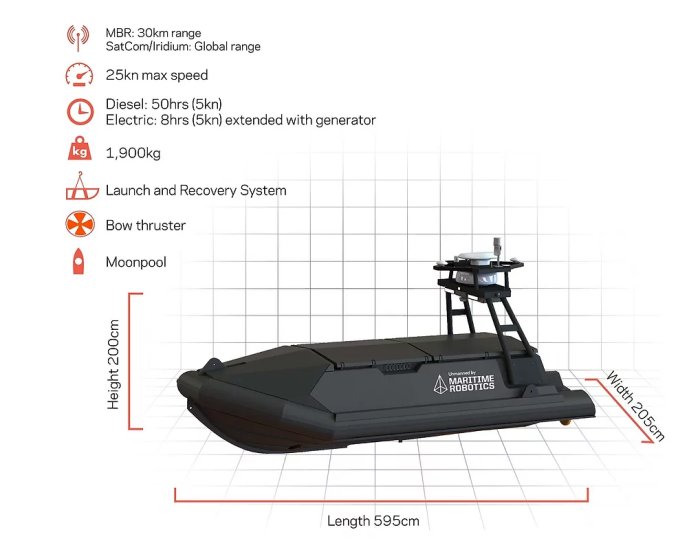
Model Mariner -Unmanned Surface Vehicle
The Mariner Unmanned Surface Vehicle (USV) is a multi-purpose unmanned vehicle for offshore and coastal applications. The Mariner USV is made of polyethelene and offers a very stable, unsinkable and near maintenance-free construction. The vehicle will fit into a standard 20 feet container for easy cargo shipping. The Mariner is equipped with a large payload room and can be equipped with a variety of surface and sub-surface sensors/payload types such as: EO/IR camera, radars, oceanographic instruments, hydroacoustic positioning systems, echo sounders (single and multibeam) and sonar systems etc. The sub-surface sensors can be mounted through a moon-pool in the mid area of the craft, and an elevator mechanism for sinking and lowering the sensor under the hull can also be installed. The Mariner can be delivered with diesel engine with water jet or diesel-electric propulsion system with water jet and thrusters.
Geophysical Mapping, Bathymetric Mapping, Seismic Surveys, Shallow Water Hydrography, Underwater Archaeology, Seabed Node Assessment
Environmental Monitoring, Algal Monitoring, Habitat Mapping, Fisheries & Aquatic Habitat Assessment
Bathymetric mapping, Mine Countermeasures, Harbor Wall and Seabed Surveys, Port & Harbor Security
ENVIRONMENTAL MONITORING
Knowledge and data from our oceans are crucial for a sustainable future. Unmanned Surface Vehicles can carry oceanographic sensors in ways that have been too expensive or risky.
BATHYMETRY
Ultra compact single beam and multi beam sonar systems are available for integration. Unmanned Surface Vehicles offer a great advantage in repetitive and tedious missions. Bathymetry is an application where we see great potential for a seabed-mapping USV.
AUV AND ROV OPERATIONS
Robots helping other robots is the next frontier. With the cost-effective capabilities of having a USV as a communication relay and support platform on the sea-surface, underwater Remotely Operated Vehicles (ROV) and Autonomous Underwater Vehicle (AUV) operations can be made possible.
VEHICLE CONTROL STATION
The USV operator interacts with the Mariner through the Vehicle Control Station usually located on shore or on a mother vessel. The intuitive graphical user interface with sea map, AIS, video and radar overlay can also be augmented with AIS and radar-based collision warnings.
PAYLOADS
The Mariner can carry a variety of customer defined sensors for seabed and environmental mapping. Quality control and monitoring of the sensor performance and coverage area are performed via the Vehicle Control Station (VCS). Sensors such as ADCP, CTD, fluorometers, hyper-spectral imager and other environmental sensors are