J. Schmalz GmbH
- Home
- Companies
- J. Schmalz GmbH
- Products
- Schmalz - Suction Spider - Robot ...

Schmalz - Suction Spider - Robot Grippers
FromJ. Schmalz GmbH
Schmalz individually designs vacuum suction spiders for your application needs. The vacuum suction spiders have been designed according to a modular principle. All versions of the vacuum suction spider are derived from the basic design which can be flexibly optimized for complex handling tasks. Our experienced system consultants also use individual vacuum components from our broad range of products.
Most popular related searches
- Automation of handling sequences in manufacturing, assembly and quality inspection processes
- Interlinking of robots in presses and bending centers
- Automation of plastic injection molding and thermoforming machines, wood and plastic machining centers, waterjet, laser and punching machines
- Picking in warehouse and distribution centers at industrial robots or gantries
- Handling of metal profiles, blanks, stones, sheet material, car body parts, glass and ceramic components, solar panels, etc.
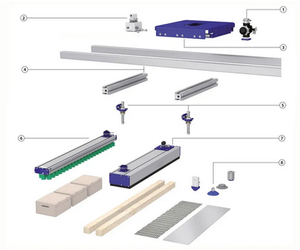
The figure shows the basic design of the suction spider SSP. On request, individual configurations with many extensions are possible.
- Vacuum valve Pneumatic interface
- Terminal box Electronic interface
- Flange connection Mechanical interface for common robots and gantries
- Mounting sections Used as load beam and vacuum distributor
- Flexible suspension Spring-mounted connection suitable for workpieces with height differences
- Gripping system (FMP/FXP) with suction cups For handling uneven and non-rigid workpieces
- Gripping system (FMHD) with foam For handling heavy and rough workpieces
- Grippers with different gripping principles For handling a wide range of workpieces (e.g. magnetic grippers for handling perforated plates or needle grippers for CFRP materials)