

ANYbotics AG
- Home
- Companies
- ANYbotics AG
- Software
- ANYbotics - Robot Centric Elevation ...
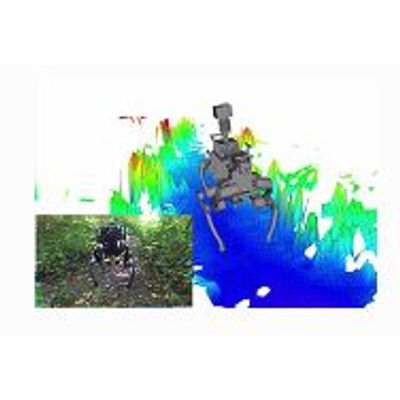
ANYbotics - Robot Centric Elevation Mapping Software for Rough Terrain Navigation
FromANYbotics AG
This is a ROS package developed for elevation mapping with a mobile robot. The software is designed for (local) navigation tasks with robots which are equipped with a pose estimation (e.g. IMU & odometry) and a distance sensor (e.g. kinect, laser range sensor, stereo camera). The provided elevation map is limited around the robot and reflects the pose uncertainty that is aggregated through the motion of the robot (robot-centric mapping). This method is developed to explicitly handle drift of the robot pose estimation.