

- Home
- Companies
- Alberding GmbH
- Software
Alberding GmbH software

Alberding - Model Beacon.net - GNSS Positioning Modular Software
Alberding Beacon.net is a modular software solution for operators of DGNSS positioning and information services for inland waterways and ports. The service-based approach supports the separation of information generation from its transmission via different broadcasting channels (Beacon, AIS, Internet).
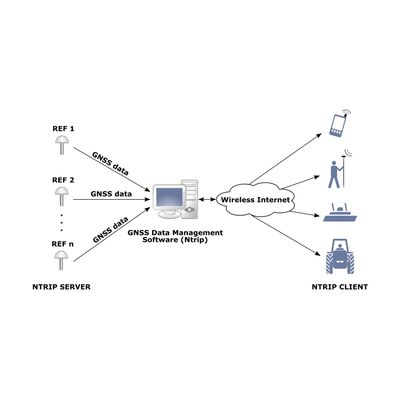
Alberding - Model Ntrip - GNSS Data Management Software
The Alberding GNSS Data Management Software (Ntrip) is a high performance Ntrip broadcaster software developed for GNSS infrastructure operators and real-time service providers. It can be used to collect GNSS data from hundreds of reference stations and provide corrections to thousands of simultaneously connected users via the Internet. Software configuration, service management and monitoring could not be easier, thanks to the powerful and user-friendly web interface.

Alberding - Model AMoS - Monitoring Software
Alberding GmbH has been developing and operating monitoring systems for a wide range of applications for many years. By usingown hardware solutionscustomer specific requirementscan be considered. The use of flexible web servers (Cloud) enables afully automated data flowand alow-maintenancesystem operation.

Alberding - GNSS Positioning Status Software
The overall quality of a GNSS ground infrastructure and the positioning services built upon it depends on the quality of each of its hardware and software components. System integrity monitoring and quality control play an important role in making a GNSS service successful.

Alberding - Model MaPoS - Machine Positioning Software
The AlberdingMaPoS softwareis designed to accurately determine the position and direction (pitch, roll, yaw) of large surface mining equipment. The machine positioning is based on the measurement data from precise GNSS RTK sensors and inclinometers. Customized formats are output to the machine`s control unit. The MaPoS software has been successfully used for more than 10 years to determine the bucket wheel center of open pit excavators using three GNSS RTK sensors or one RTK and one RTK/Heading sensor. The combination of an RTK/Heading sensor with a two-axis inclination sensor is also supported.